Gazette Linux n°156 — Novembre 2008
Copyright © Année de création Prénom Nom de l'auteur
Copyright © 2010 Luc Mioulet
Copyright © 2011 Gaël Montreuil
Article paru dans le n°156 de la Gazette Linux de novembre 2008.
Cet article est publié selon les termes de la Open Publication License. La Linux Gazette n'est ni produite, ni sponsorisée, ni avalisée par notre hébergeur principal, SSC, Inc.
Table des matières
Cet article a pour but de présenter le logiciel SIG GRASS et de fournir une démonstration de ce à quoi il peut servir. Comme tout logiciel SIG, il est très complexe : il possède un très grand nombre de paramètres et de commandes, et même pour une utilisation de base une connaissance théorique assez poussée est demandée. Néanmoins, nous pensons que cette rapide présentation sera sans doute utile pour un utilisateur néophyte qui désire maîtriser un logiciel SIG.
Une grande partie de cet article est dédiée à l'utilisation pratique de ce logiciel, en particulier à la collecte de données réelles, la reprojection de cartes, et la sortie de résultats. Ce choix résulte du fait qu'il est très difficile (voire parfois impossible) de trouver une présentation systématique de ces informations sur internet. Par contre, la présentation de l'interface et de l'information théorique de second ordre seront très brèves : il est possible de les obtenir via de nombreuses sources (voir la section à la fin de ce document).
Puisqu'il y a tellement de points différents à présenter, et comme il ne faut pas sacrifier la clarté au profit de la brièveté, certains sujets (à savoir : la réalisation de cartes climatologiques, la création d'une interface entre GRASS et un logiciel de statistiques,etc.) seront traités dans un autre article.
Les Systèmes d'Information Géographique (SIG) sont des logiciels permettant de collecter, stocker, gérer et restituer des données référencées géographiquement. Un SIG se caractérise par sa capacité à examiner différents jeux de données géo-référencées et à déterminer si il existe une relation entres ces informations. En d'autres termes, un SIG peut trouver des relations entre les informations qu'il serait difficile d'établir par d'autres moyens.
Par exemple, il est possible de relier des informations géo-référencées (ex : foyers de maladies), avec d'autres données (ex : localisation des zones urbaines et rurales, données climatiques). Ceci peut apporter des informations utiles permettant de prendre les bonnes décisions pour limiter la progression d'une épidémie.
De nos jours les SIG sont utilisés dans de nombreux domaines scientifiques, comme la gestion des ressources, l'évaluation de l'impact sur l'environnement, l'écologie, l'archéologie, la cartographie, l'épidémiologie.
Les SIG sont tout à fait en mesure de faire toutes sortes d'analyses spatiales et d'effectuer le traitement d'entités géographiques. Par exemple :
Topologie par superposition : le logiciel est capable de superposer les éléments de deux cartes thématiques pour créer une nouvelle carte (ex : l'utilisateur superpose les limites d'un parc naturel avec les limites des communes pour déterminer les zones de responsabilités propres à chacun);
Zones tampon : possibilité de définir des zones à une certaines distance d'un élément donné (ex: lac, colline, rivière).
Analyse de réseaux : les algorithmes qui à partir d'un réseau (ex : routes) permettent de connaître le chemin le plus court entre deux points.
Analyse géo-statique : analyse de la corrélation entre des variables référencées géographiquement (ex : l'altitude par rapport à l'humidité).
Le SIG Système de Support d'Analyse des Ressources Géographiques (Geographic Resources Analysis Support System), GRASS, (http://grass.osgeo.org/) est un système d'information géographique sous licence GNU General Public Licence (GPL). Il est développé pour les systèmes d'exploitation GNU/Linux, Mac OS/X, et Windows. Le développement de GRASS a lieu à la fois sur des branches stables et des branches en développement. Dans la plupart des cas il vaut mieux utiliser les premières.
GRASS est capable de faire de la gestion de données, du traitement d'images, de la création de graphiques, de la modélisation spatiale, et de la visualisation de nombreux types de données. C'est un projet officiel de la Open Source Geospatial Foundation (http://www.osgeo.org/).
À l'origine GRASS a été développé par le U.S. Army Construction Engineering Research Laboratories (USA-CERL) comme outil de gestion foncière et de planification de l'environnement pour l'armée. De 1982 à 1995, l'USA-CERL a assuré le développement de GRASS, avec l'implication de nombreux autres organismes, comme des universités ou des agences fédérales.
En 1995 c'est un groupe de l'université de Baylor qui prend en charge le développement. Durant cette période, le logiciel est exporté pour Linux. En 1998, Markus Neteler, l'actuel chef du projet, annonce la sortie de GRASS 4.2.1, qui offre de nombreuses améliorations majeures, y compris une nouvelle interface graphique. En octobre 1999, la licence du logiciel GRASS, originellement sous licence publique, passe en GNU GPL (ce changement a lieu officiellement avec GRASS v5.0). Pour plus d'informations sur l'historique, on peut lire la page suivante : http://grass.osgeo.org/devel/grasshist.html .
GRASS est maintenant devenu un outil puissant, avec un grand nombre d'applications. Il est utilisé de part le monde par de nombreuses universités et entreprises, ainsi que par des agences gouvernementales et des agences de conseil en environnement.
Au démarrage de GRASS, l'utilisateur voit s'afficher à l'écran un shell Unix contenant un environnement modifié qui gère l'exécution des commandes GRASS (connues sous le nom de modules). Il est également possible de passer par une interface graphique pour utiliser la plupart des modules et fonctionnalités de GRASS. Il y a plus de 200 modules de base dans GRASS, et plus de 100 modules complémentaires réalisés par des utilisateurs et disponibles sur le site de GRASS. Les bibliothèques et les modules de base de GRASS sont en C, tandis que les autres sont en C, shell Unix, Tcl, ou d'autres langages de script.
Les données gérées par GRASS peuvent être géométriques ou attributaires. Dans le premier cas nous trouvons :
Des données matricielles : données étalées de manière continue dans l'espace, structurées dans une matrice à cellules quadratiques. Chaque cellule reçoit un attribut (ex : température, humidité, altitude, code d'utilisation du sol/de l'aménagement du territoire, etc.). La détection à distance (ex : images infrarouges récoltées en altitude) et les images satellites sont des exemples classiques. Les données matricielles ne sont pas associées à des relations de proximité car chaque pixel se suffit pour se définir.
Des données vectorielles: utilisées pour le stockage d'informations concernant des lignes et des zones homogènes définies par des contours fermés. Une ligne connecte deux points limites identifiés par leurs coordonnées. Les frontières sont des exemples de telles données. Chaque objet vectoriel peut être associé à plusieurs attributs.
Les données sont des attributs en interconnexion avec les types de données citées précédemment. Par exemple, un calque vectoriel représentant les frontières peut être associé à des données concernant la population du pays, le numéro d'identification du territoire, etc. Les données sont généralement enregistrées dans le SIG ou dans une base de données couplée au SIG.
GRASS prend en charge un très grand nombre de formats vectoriels et matriciels grâce à la bibliothèque de conversion http://www.gdal.org/. La version 6 de GRASS possède un nouveau moteur vectoriel de topologie 2D/3D, ainsi que la prise en charge de l'analyse des réseaux de vecteurs. Les attributs sont habituellement gérés dans des fichiers de bases de données .dbf, même si d'autres SGBD peuvent être utilisés. Le logiciel est capable de visualiser des données graphiques vectorielles en 3D.
Il existe une très grande quantité d'informations, de documentation et de ressources concernant GRASS. La documentation comprend l'accès à une assistance intégrée, une liste de FAQ (http://grass.osgeo.org/faq/index.html), et un nombre de manuels. En plus des manuels (http://grass.osgeo.org/gdp/books.php), la page internet de documentation de GRASS héberge aussi une grande quantité de documentation produite par les utilisateurs, comme des tutoriels et des cours (http://grass.osgeo.org/faq/index.html ainsi que des notices (http://grass.osgeo.org/gdp/manuals.php).
La dernière version de GRASS se trouve sur la page de téléchargement (http://grass.osgeo.org/download/index.php. On trouvera sur cette page les fichiers pré-compilés pour plusieurs Systèmes d'exploitation ainsi que le code source.
L'installation depuis les sources nécessite deux bibliothèques supplémentaires : PROJ4 pour la gestion des projections et DAL/OGR pour la lecture et l'écriture dans différents formats de SIG. Ces bibliothèques doivent être installées dans le bon ordre avant d'installer GRASS.
La première étape consiste à télécharger PROJ4 depuis la page http://trac.osgeo.org/proj/. La dernière version de la bibliothèque est la 4.6.0. L'installation est assez simple :
tar zxf proj-4.6.0.tar.gz cd proj-4.6.0/ ./configure make make install
Cette bibliothèque permet la gestion des projections de carte, c'est à dire n'importe quelle méthode utilisée en cartographie pour représenter la surface courbée en deux dimensions de la Terre, ou de tout autre objet sur un plan. Les cartes planes ne pourraient pas exister sans la projection de cartes, une sphère ne peut pas être représentée sur un plan sans distorsions. Pour utiliser certains paquets du SIG, il est nécessaire d'avoir des éléments de base sur ce sujet. Certains éléments sont donnés dans la suite :
La deuxième étape est d'installer le couple de bibliothèques GDAL/OGR. La dernière version (1.5.2) peut être téléchargée depuis http://download.osgeo.org/gdal. La procédure d'installation, là aussi, est habituelle :
tar zxf gdal-1.5.2.tar.gz cd gdal-1.5.2/ ./configure make make install
GDAL est une bibliothèque de traduction pour les données géo-spatiales matricielles, tandis que la bibliothèque OGR (qui se trouve dans l'arbre de développement source de GDAL) donne des possibilités similaires pour les données vectorielles de caractéristiques simples. Ces bibliothèques permettent d'importer et d'exporter les fichiers entre différents SIG.
Enfin nous pouvons maintenant installer GRASS. La dernière version stable du logiciel (en ce moment la 6.2.3) est située sur la page de téléchargement de GRASS. Le logiciel est installé selon la même ritournelle :
tar zxf grass-6.2.3.tar.gz cd grass-6.2.3/ ./configure make make install
La première chose qui est demandée à l'utilisateur est de créer un répertoire (la base de données de GRASS) qui contiendra les données de GRASS. Comme d'habitude, le plus simple est de créer un répertoire « GRASS » (ou « grassdata ») dans le répertoire HOME de l'utilisateur.
Une arborescence avec des sous répertoires, nommée "location" (zone) , est automatiquement créée dans la base de données de GRASS pour chaque région de projet définie. Toutes les données de projet sont enregistrées dans le sous-répertoire location. Le "location" peut être divisé en sous-répertoires de cartes nommés mapsets (ensembles de cartes).
Les informations d'ordre général à propos de la zone du projet sont enregistrées à l'intérieur du location dans le mapset PERMANENT, qui est automatiquement généré par GRASS. Un utilisateur peut créer un ou plusieurs mapsets pour une zone donnée. Ils peuvent être étendus à la totalité du projet ou à un espace plus restreint. Cette caractéristique permet à plusieurs utilisateurs de travailler en même temps sur un même projet, tout cela sans prendre le risque d'avoir des problèmes de concurrence. Plus d'informations concernant la structure de l'arbre d'un "location" peuvent être obtenues, par exemple sur la page http://www.gdf-hannover.de/lit_html/grass60_v1.2_en/node10.html.
GRASS peut ensuite être démarré par la commande suivante :
grass62
Le programme ouvre un terminal modifié et affiche le texte suivant :
WELCOME TO GRASS Version 6.2.3 2007 1) Have at your side all available GRASS tutorials 2) When working on your location, the following materials are extremely useful: - A topo map of your area - Current catalog of available computer maps 3) Check the GRASS Web pages for feedback mailing lists and more: http://grass.itc.it/ http://grass.ibiblio.edu/ Hit RETURN to continue
Après avoir appuyé sur la touche entrée, l'interface graphique de GRASS s'affiche dans une fenêtre. À partir de cette fenêtre on peut choisir le mapset et la zone à afficher, voir l'image :
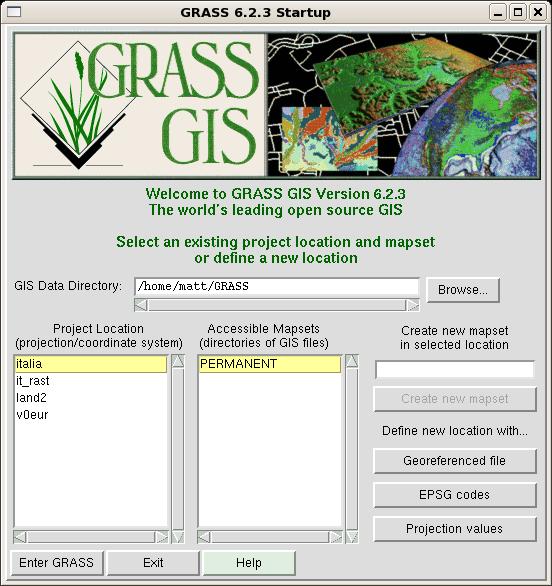
À partir de cette fenêtre, on peut lire deux informations importantes :
Le répertoire de la base de données du logiciel (par exemple :
/home/matt/GRASS) où toutes les données SIG se trouvent;Les locations zone disponibles dans le répertoire de la base de données. Dans le cas traité, il y a 4 zones.
En plus de pouvoir choisir une zone, il est aussi possible d'en créer une nouvelle, et ce de trois manières différentes. Ces méthodes diffèrent par la quantité d'information que doit renseigner l'utilisateur. Le cas le plus simple se présente lorsque les données sur la zone se trouvent déja dans la carte importée (fichier géo-référencé); dans ce cas aucune information complémentaire n'est requise.
La création d'une nouvelle zone nécessite les informations suivantes (entrées par l'utilisateur où indirectement par l'ajout d'une carte):
Le système de coordonnées pour la zone;
Les coordonnées minimum et maximum de la région qui nous intéresse;
La limite de résolution au sol.
Ces paramètres sont cruciaux pour un affichage et une gestion correcte de la zone. C'est pour cela qu'avant de poursuivre, cela vaut la peine de présenter quelques informations théoriques sur les projections et le système de coordonnées.
Dans un SIG, les informations sont stockées selon des coordonnées; ce qui rend nécessaire la spécification d'un système de coordonnées. Pour des données géographiques, le système géographique (les célébrissimes latitude http://en.wikipedia.org/wiki/Latitude et longitude http://en.wikipedia.org/wiki/Longitude) ou une projection géodésique comme l'Universal Transverse Mercator (UTM) ou Gauss-Krüger sont des choix habituels.
Le système de coordonnées UTM est une méthode de type quadrillage pour spécifier une position à la surface de la Terre. Elle diffère de la méthode traditionnelle latitude-longitude sur plusieurs points. Le système Gauss-Krüger est similaire au système UTM avec quelques différences minimes. On trouvera des informations supplémentaires sur ces systèmes de coordonnées en consultant la liste « à lire » en fin d'article.
Pour optimiser la projection du géoïde sur une carte plane, la Terre est approximée par une ellipse.
Différentes projections sont utilisées car chacune d'entre elles possède des propriétés spécifiques, qui sont plus ou moins appropriées selon les traitements à réaliser dans une zone. Par exemple, une projection qui représente avec exactitude la forme des continents va distordre leur taille relative. GRASS offre des projections prédéfinies, en plus du système géographique et la possibilité de créer une projection géodésique personnalisée. Dans ce dernier cas, le type de projection, l'ellipsoïde et le plan de niveau (référence depuis laquelle les mesures sont effectuées), pour la référence de l'ellipsoïde (http://en.wikipedia.org/wiki/Datum_(geodesy)) doivent être rajoutées.
Le meilleur moyen de mesurer le côté fonctionnel de GRASS est de le voir en action sur un cas d'étude réel. Dans un premier temps, voici la question habituelle qui hante tout nouvel utilisateur : « Bon, je viens tout juste d'installer ce super logiciel et j'ai plein de données géo-référencées à analyser et à corréler avec les caractéristiques géo-physiques de ma zone d'étude. Mais quid des cartes géophysiques? Où puis-je en trouver? Quels genre de données thématiques sont disponibles pour la région qui m'intéresse? ».
La réponse dépend évidemment du type d'analyse que vous avez prévu, et de la région qui vous intéresse. Les cartes thématiques les plus souvent demandées sont entres autres :
Les données sur l'altitude,
Les données satellites,
Les données sur l'utilisation du sol,
Les données climatologiques,
Les frontières d'états.
Ne vous faites pas d'illusion, si vous désirez une carte très particulière et de très haute résolution, votre seul espoir est de trouver cette ressource auprès d'une agence locale qui vous la fera payer (sans doute à prix fort). Parfois ces données peuvent être numériques, sinon vous devrez scanner les documents.
Si vous êtes intéressés par des cartes de grandes régions avec une résolution moyenne (30 à 100m), le net héberge des ressources formidables que vous devriez exploiter. Dans la section suivante, nous décrivons des ressources sur la Toile qui mettent des informations à disposition en téléchargement gratuit, et le moyen de les importer dans GRASS.
La Shuttle Radar Topography Mission (SRTM) a effectué des relevés d'altitude à l'échelle quasiment mondiale, produisant ainsi la base de données topographique numérique haute-résolution la plus complète qui soit. SRTM est constitué d'un système de radars spécialement modifiés, placé à bord de la navette Endeavor, lors d'une mission de 11 jours en février 2000. Les données SRTM sont disponibles en 3 secondes d'arc. Les données en 1 seconde d'arc sont disponibles pour les États-Unis. Le Global Land Cover Facility donne un accès gratuit à ces données (http://glcfapp.umiacs.umd.edu:8080/esdi/). Les données contiennent des zones vides, là où l'eau et de fortes occlusions ont empêché l'estimation de l'altitude.
Dans l'exemple qui suit nous expliquons comment obtenir les données d'altitude pour la Toscane (Italie centrale), où nous résidons.
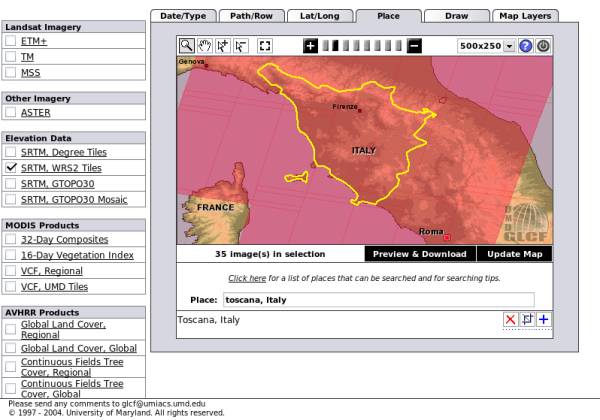
La collecte de données débute par une connexion à la page web du Global Land Cover Facility (http://glcfapp.umiacs.umd.edu:8080/esdi/). Nous allons expliquer les trois façons pour accéder aux données en 30 secondes d'arc (Map Search, Path/Row Search, Product Search). Commençons par la première, Map Search (recherche de carte) : l'utilisateur doit choisir le produit qu'il recherche dans le panneau de gauche, puis sélectionner la région qui l'intéresse (la carte sur la droite). Puisque nous sommes intéressés par les relevés d'altitude, nous pouvons choisir parmi les quatre options disponibles. Vous remarquerez que GTOPO30 est un modèle d'altitude numérique mondial avec une grille horizontale espacée de 30 secondes d'arc, donc dix fois moins précise que les données du SRTM. Les deux premières options sont des façons différentes d'accéder au jeu de données de la SRTM : la première vous permet de télécharger des carreaux de 1 degré carré, tandis que la deuxième accède aux carreaux WRS-2 pour approximer les vues de Landsat, ce que nous présentons au paragraphe suivant. Pour des raisons qui paraitront évidentes, nous avons choisi la deuxième option.
Nous allons désormais devoir choisir la région géographique qui nous intéresse, en cliquant sur le panneau « place » (lieu), juste au dessus de la mappemonde. Dans la boîte de dialogue qui s'affiche écrivez « Toscana, Italy » et appuyez sur Entrée. En règle générale on tape « Lieu, État ». Vous devriez alors voir apparaître une page similaire à celle montrée dans la figure suivante.
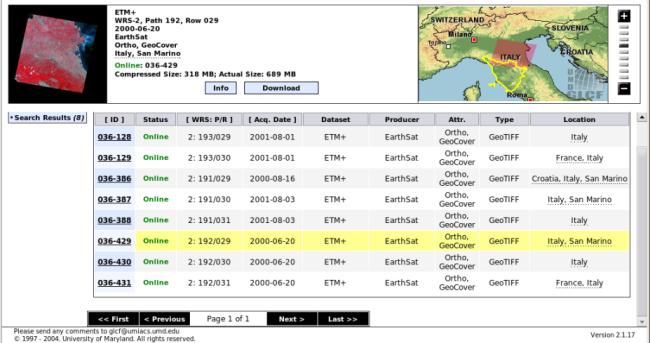
Il y a 35 cartes disponibles dans le lot. La prochaine étape est de choisir celles qui sont réellement intéressantes. Ayant appuyé sur le bouton « Preview and Download », la fenêtre de choix apparait. Elle ressemble à la figure ci-dessous:
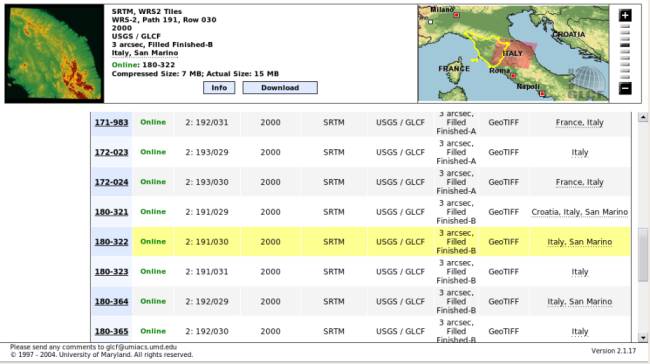
L'écran est divisé en deux zones. La partie basse donne la liste des cartes disponibles, avec l'information qui leur est associée, en particulier, le type de données (le format GeoTIFF, format matriciel très répandu), l'état (unfinished, unfilled, finished-a et finished-b, dans l'ordre croissant des états de traitement et de notre préférence). Dans la troisième colonne, il y a des données qui permettent l'identification d'attributs chemin/ligne utilisés pour les données satellites Landsat. L'utilisateur peut choisir une carte en cliquant sur son ID (première colonne). Dans la zone supérieure, les informations au sujet de la zone sélectionnée sont affichées. Dans la partie droite l'utilisateur peut vérifier la zone recouverte par la carte. Cette image est d'une grande aide pour le choix des cartes qui nous intéressent. Une fois que la carte souhaitée a été identifiée, l'utilisateur doit appuyer sur le bouton téléchargement, et télécharger le fichier .tif.gz depuis la fenêtre qui apparaît.
À la fin du scan vous constaterez qu'il n'est nécessaire de télécharger que quatre cartes : ID 180-332 (chemin/ligne: 191/030), ID 180-364 (192/029), ID 180-365 (192/030), et ID 180-408 (193/029). Ces fichiers peuvent être sauvegardés dans un répertoire, par exemple $HOME/SRTM, puis décompressés.
Les fichiers GeoTIFF contiennent les informations sur le système de coordonnées, la projection et le plan de niveau utilisés pour leur géo-référencement. De cette manière il est possible de les utiliser pour définir une nouvelle zone GRASS, et par la suite de les importer dans le logiciel.
Ce processus est un peu fastidieux. Depuis la page de démarrage de GRASS (la première image de cette article), définissez une nouvelle zone en appuyant sur le bouton « Georeferenced file ». Une fenêtre s'ouvre, insérez-y le nom de la nouvelle zone (par exemple : « tuscany » ou « toscane ») et dans la dernière sélectionnez le chemin permettant d'accéder à l'un des quatre fichiers (par exemple : SRTM_ffB03_p192r029.tif). Clôturez la création de la zone en appuyant sur "Define location". GRASS génère alors une arborescence pour la nouvelle zone et affiche une alerte exigeant l'arrêt du programme.
Au redémarrage vous pourrez voir votre première nouvelle zone générée!
Choisissez la zone tuscany et le jeu de données PERMANENT, appuyez ensuite sur « Enter GRASS ». La console affichera alors le message de bienvenue suivant :
Welcome to GRASS 6.2.3 (2007) GRASS homepage: http://grass.itc.it/ This version running thru: TC Shell (/bin/tcsh) Help is available with the command: g.manual -i See the licence terms with: g.version -c If required, restart the graphical user interface with: gis.m & When ready to quit enter: exit Mapset <PERMANENT> in Location <tuscany> GRASS 6.2.3 >
En plus de cela trois fenêtres supplémentaires vont s'ouvrir : l'interface graphique utilisateur GUI (fenêtre GRASS 6.2.3 GIS Manager), la fenêtre de sortie, qui accueille l'ensemble des sorties de toutes les commandes provenant du GUI, et la fenêtre d'affichage de la carte. A cet instant, la zone Toscane est créée mais elle n'héberge pas de données. L'importation des quatre cartes téléchargées peut être réalisée par ligne de commande ou bien par l'interface graphique. Nous illustrons d'abord la seconde méthode, puisqu'elle affichera aussi les commandes associées à cette procédure.
Depuis la barre de menu de l'interface graphique, sélectionnez . Remplissez le formulaire qui va s'ouvrir de la même manière que cette figure :
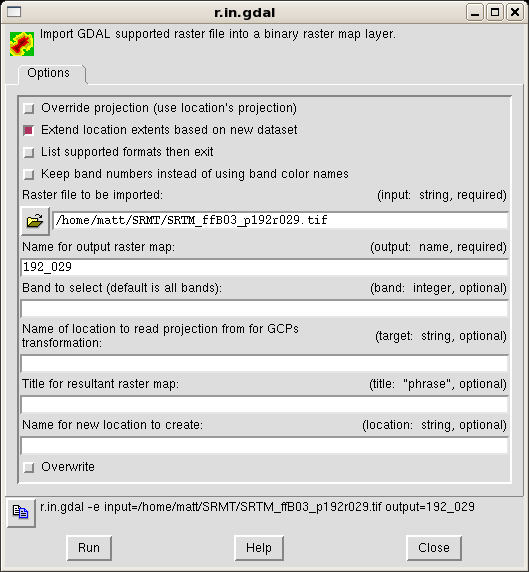
Les seules informations obligatoires sont le nom du fichier d'entrée, et le nom du fichier en sortie, c'est à dire, le nom interne auquel GRASS associe cette carte. L'option « Extend location extents based on new datasat » va étendre la zone pour accueillir la carte importée.
La dernière ligne de la fenêtre affiche la ligne de commande associée à l'opération d'import. Sa syntaxe est très simple et permet d'importer rapidement des cartes par la console. Au moment où la console vous donnera la main, rentrez la commande :
r.in.gdal -e input=/home/matt/SRTM/SRTM_ffB03_p192r030.tif output=192_030 r.in.gdal -e input=/home/matt/SRTM/SRTM_ffB03_p193r029.tif output=193_029
Malheureusement en essayant d'importer la quatrième carte vous recevez l'erreur suivante :
r.in.gdal -e input=/home/matt/SRTM/SRTM_ffB03_p191r030.tif output=191_030
ERROR: Projection of dataset does not appear to match current location.
Que se passe t'il? La réponse est simple, tout comme la solution. La projection de l'information contenue dans cette carte est différente de celle des trois précédentes. La solution la plus simple est d'importer la carte dans une nouvelle zone (disons « tuscany2 », qui sera créé ad-hoc, et ensuite reprojeter les données dans la zone actuelle. Cette première étape est effectuée en ajoutant le paramètre à r.in.gdal:
r.in.gdal -e input=/home/matt/SRTM/SRTM_ffB03_p191r030.tif output=191_030 location=tuscany2
Étant donné que la projection d'une carte n'étend pas la frontière des régions à la volée, vous devez être certain que votre région est assez grande pour contenir la carte projetée. Dans ce cas, cette condition n'est pas remplie, la quatrième carte dépasse du côté Est. Vous allez devoir ajuster manuellement la frontière avec la commande g.region () et ensuite reprojeter ().
Quelle valeur mettre pour la frontière est? Pour déduire cette information, il est préférable de regarder les coordonnées de l'une des cartes importées auparavant. Vous pouvez effectuer cette opération en fixant les frontières de la zone pour la faire correspondre à l'une des zones et ensuite extrapoler la zone de la quatrième carte. Par exemple :
g.region rast=192_029 g.region -p
La première commande fixe les frontières de la zone pour les faire correspondre à celles de la carte 192_029. La seconde récupère tous les paramètres de la zone. A partir de la sortie nous obtenons de nombreuses informations : le système de coordonnées, la projection, le plan de niveau, et les frontières ()
projection: 1 (UTM) zone: 32 datum: wgs84 ellipsoid: a=6378137 es=0.00669437999014138 north: 5065399.56462278 south: 4821139.56462278 west: 576236.63839707 east: 828866.63839707 nsres: 90 ewres: 90 rows: 2714 cols: 2807 cells: 7618198
Les mesures affichées sont en mètres. Il est désormais possible de fixer la frontière Est :
g.region e=968866
Et on reprojette la carte sur la zone actuelle :
r.proj input=191_030 location=tuscany2 output=191_030 method=nearest
La syntaxe de r.proj est assez explicite. L'option de méthode choisit l'algorithme d'interpolation à utiliser.
N.B : si vous définissez une frontière Est invalide et que vous devez reprojeter la carte vous devez ajouter le drapeau --overwrite à la fin de la commande r.proj.
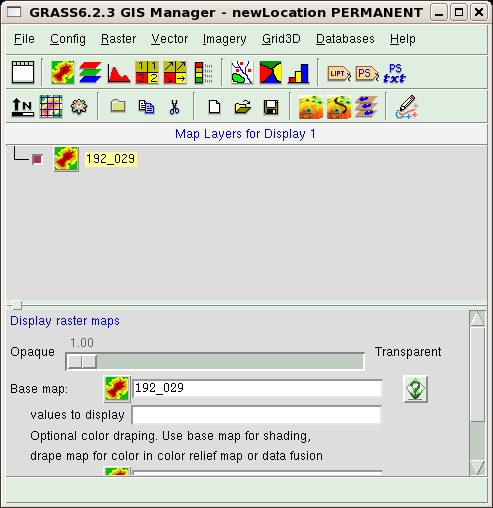
Il est maintenant temps de voir certaines sorties de GRASS. Regardons l'une des cartes importées, disons 192_029. On effectue cela en passant par le GUI et en appuyant sur le bouton .

Un nouveau calque matriciel vide est alors ajouté pour visualisation dans la zone supérieure de la fenêtre GUI. En cliquant sur le nom du calque, la partie inférieure de la fenêtre affichera une forme. On peut alors définir quelle carte est associée à ce calque. Appuyez sur le bouton "Base map" et sélectionnez la carte dans la liste qui s'affiche. A la fin de cette procédure leGUI devrait ressembler à quelque chose comme cela :
Vous devriez désormais être en mesure d'admirer votre travail. Dans la fenêtre d'affichage de la carte, appuyez sur le bouton (le premier bouton). La fenêtre restera probablement vide. Dans ce cas nous allons ajuster le zoom de la fenêtre d'affichage aux limites de la région (que nous avons définies dans la section précédente). Appuyez sur le bouton "Zoom to"

et sélectionnez l'option "Zoom to current region" comme sur la figure :
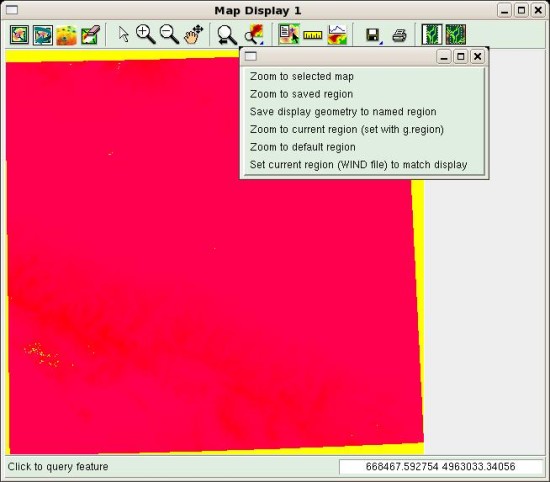
La carte affichée devrait être majoritairement rouge, à l'exception de quelques zones jaunes, qui correspondent aux zones sans information. Un instrument utile est disponible sur la fenêtre d'affichage de la carte : le bouton de requête

Sélectionnez-le et cliquez sur la carte, la valeur associée à la cellule est alors affichée dans la fenêtre de sortie. Vous découvrirez par exemple que les zones sans données sont représentées par la valeur -32768.
Nous en arrivons maintenant à l'étape du nettoyage de carte. Nous devons raccorder les quatre cartes pour obtenir une nouvelle carte composite. Avant cela, nous devons nettoyer les cartes. En fait GRASS s'attend à ce que les zones sans données soient identifiées par la valeur NULL, mais comme nous le savons les cartes SRTM les associent à la valeur -32768. La commande suivante corrige ce problème () :
r.null map=191_030 setnull=-32768 r.null map=192_029 setnull=-32768 r.null map=192_030 setnull=-32768 r.null map=193_029 setnull=-32768
L'étape suivante est de corriger la position des frontières. GRASS peut faire des frontières à partir d'une série de cartes. Nous allons utiliser cette propriété dans la commande suivante :
g.region rast=191_030,192_029,192_030,193_029
Les frontières résultantes englobent exactement les quatre cartes. Pour la dernière étape nous allons fusionner les cartes et définir un niveau de couleur approprié :
r.patch in=191_030,192_029,192_030,193_029 output=elev r.colors map=elev rules=srtm
La commande r.patch () génère une nouvelle carte, nommée elev, qui est la fusion des quatre cartes, tandis que r.colors () définit le niveau de couleur en utilisant les règles appropriées au STRM.
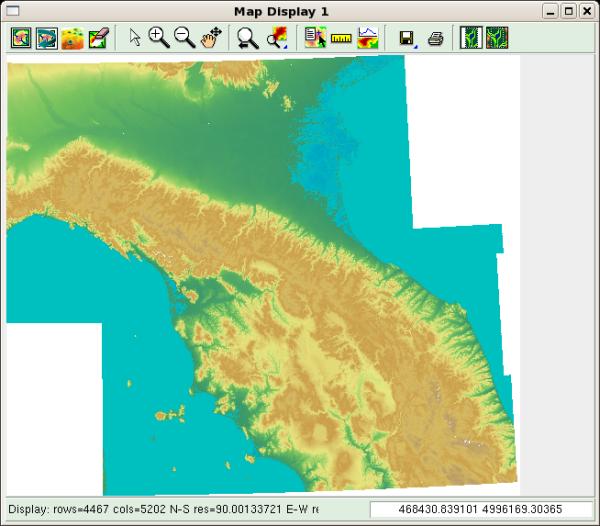
Pour voir correctement la carte, on doit redémarrer GRASS après avoir fermé la session en tapant exit dans la console et quitté le gestionnaire de fenêtres. Après avoir redémarré le logiciel, on peut afficher le résultat final de notre travail : répétez la procédure utilisée pour afficher une carte matricielle et choisissez la carte elev. La carte devrait alors être similaire à celle-ci :
Si le résultat est satisfaisant on peut supprimer les quatre petites cartes. Dans le GUI, le chemin est " et remplissez le champ « raster » (matrice) avec le nom des cartes à supprimer. Dans la ligne de commande tapez :
g.remove rast=191_030,192_029,192_030,193_029
À la fin de cette section nous avons créé une carte représentant l'altitude du centre de l'Italie. Plus tard nous en extrairons les données liées à la région Toscane et nous nous débarrasserons du reste. En dernière remarque, comme la couverture SRTM est mondiale, la procédure peut être répétée pour n'importe quelle zone.
Landsat-7 est un satellite lancé en avril 1999. Il a une orbite synchronisée avec le soleil et proche du pôle qui lui permet d'enregistrer la surface de la Terre dans une configuration où se chevauchent des bandes de 185km, avec un balayage complet toutes les 233 orbites. La configuration est enregistrée comme une grille mondiale composée de carreaux de 233 colonnes et 248 lignes dans ce qui s'appelle le Système de Référencement Mondial (Worldwide Referencing System WRS). Nous avons vu un exemple de ce système de référence en téléchargeant les données SRTM.
Le satellite est équipé d'un instrument appelé Enhanced Thematic Mapper (ETM+); c'est un capteur radiométrique multi-spectral. Le capteur enregistre huit bandes de données avec des résolutions spectrales et spatiales variables (30m de résolution spatiale pour le rouge, le vert, le bleu, le proche infrarouge, et 2 bandes d'infrarouge moyen; 60 m pour l'infrarouge thermique; et une bande panchromatique de 15 m). Une liste des bandes avec leur plage de longueur d'onde (en micromètres) est donnée ci dessous:
Bleu – Vert : 0,45 – 0,515 μm
Vert : 0.525-0.605 μm
Rouge : 0.63-0.690 μm
Proche infrarouge : 0.760-0.900 μm
Infrarouge moyen : 1.550-1.750 μm
Infrarouge thermique : 10.40-12.5 μm
Infrarouge moyen : 2.080-2.35 μm
Panchromatique: 0.52-0.92 μm
Les données Landsat sont disponibles depuis de nombreuses sources. En avril 2008, toutes les données collectées par ces satellites sont tombées dans le domaine public, il est donc possible de télécharger des vues acquises à différents mois et différentes années. (Voir http://landsat.usgs.gov/products_data_at_no_charge.php pour plus d'information.) Nous allons montrer ici une méthode plus simple de téléchargement, limitée à une série de données acquises dans les années 2000-2001, et disponible sur la page Web de Global Land Cover Facility. La procédure de récolte des données est identique à celle décrite dans la section précédente. L'utilisateur doit sélectionner le bon produit en cochant les cases ETM+ dans l'interface présentée dans la seconde illustration de ce document.
Le résultat devrait ressembler à ceci:
Les mêmes cartes de lignes/colonnes que celles téléchargées pour les données relatives à l'altitude sont nécessaires; cette correspondance augmente largement le choix de l'utilisateur. Dans notre cas, les identifiants des cartes sont : ID 036-387, ID 036-429, ID 036-430, et ID 036-128.
En appuyant sur le bouton , on voit que les données sont disponibles dans un jeu de huit fichiers GeoTIFF (un pour chaque bande ETM+). Ils sont beaucoup plus gros que les données SRTM, car la résolution est à peu près trois fois plus grande. On peut télécharger la bande qu'on veut.
Les données Landsat peuvent être utilisées pour évaluer le type, l'ampleur et l'état de la végétation d'une région, ou l'évolution de la végétation dans le temps. Pour le besoin de ces études, il est nécessaire qu'un index de la végétation soit calculé à partir d'un ensemble de données captées à distance. L'index le plus largement utilisé est le Normalized Difference Vegetative Index (NDVI). Le NDVI est calculé par le rapport entre la réflexivité mesurée dans les portions rouges et de proche infrarouge du spectre électromagnétique. Ces deux bandes spectrales sont choisies parce que l'absorption de chlorophylle dans la végétation verte feuillue et la densité de végétation verte à la surface ont un effet sur elles. De plus, dans les bandes rouges et de proche infrarouge, le contraste entre la végétation et le sol est au maximum.
Les bandes ETM+ 3 et 4 fournissent les mesures rouge et proche infrarouge, et par conséquent peuvent être utilisées pour générer les ensembles de données NDVI avec la formule suivante:
NDVI = (Bande 4 – Bande 3) / (Bande 4 + Bande 3)
L'équation NDVI produit des valeurs comprises allant de -1,0 à 1,0. Les zones de végétation seront caractérisées par des valeurs supérieures à zéro, et les valeurs négatives indiquent des surfaces sans végétation telles qu'une zone stérile, de l'eau, de la glace, de la neige, des nuages. Les valeurs NDVI sont habituellement mises à l'échelle pour l'affichage, avec l'équation suivante:
NDVI proportionné = 100 (NDVI +1)
Pour évaluer l'index NDVI de la Toscane, nous devons télécharger les bandes 3 et 4. Ces fichiers peuvent être sauvegardés dans un répertoire, disons, $HOME/Landsat, et décompressés.
On pourra ensuite importer dans un nouvel emplacement, par exemple landsat, pour préserver les valeurs de projection des données Landsat. Comme montré à la section précédente, la commande, pour les données 193/29, bande 4, est:
r.in.gdal -e input=/home/matt/GIS/Landsat/p193r029_7t20010801_z32_nn40.tif output=193_29_4 location=landsat
Redémarrez GRASS, entrez l'emplacement nouvellement défini, avec un mapset PERMANENT et finissez l'import:
r.in.gdal -e input=/home/matt/GIS/Landsat/p193r029_7t20010801_z32_nn30.tif output=193_29_3 r.in.gdal -e input=/home/matt/GIS/Landsat/p192r029_7t20000620_z32_nn40.tif output=192_29_4 r.in.gdal -e input=/home/matt/GIS/Landsat/p192r029_7t20000620_z32_nn30.tif output=192_29_3 r.in.gdal -e input=/home/matt/GIS/Landsat/p192r030_7t20000620_z32_nn40.tif output=192_30_4 r.in.gdal -e input=/home/matt/GIS/Landsat/p192r030_7t20000620_z32_nn30.tif output=192_30_3
Comme vu précédemment, la carte 191/30 a une projection différente, vous devez donc lire cette carte dans un nouvel emplacement (un pour chaque carte), élargir les pourtours de la région, et reprojeter les cartes dans l'emplacement courant:
r.in.gdal -e input=/home/matt/GIS/Landsat/p191r030_7t20010803_z33_nn40.tif output=191_30_4 location=landsat2 r.in.gdal -e input=/home/matt/GIS/Landsat/p191r030_7t20010803_z33_nn30.tif output=191_30_3 location=landsat2b g.region e=968866 r.proj input=191_30_4 location=landsat2 output=191_30_4 method=nearest r.proj input=191_30_3 location=landsat2b output=191_30_3 method=nearest
Pour finir, nous pouvons coller les cartes ensemble. Comme dans ce cas les valeurs nulles sont représentées par des zéros, on peut se passer de l'appel à r.null en ajoutant un drapeau -z à r.patch:
r.patch -z in=192_29_4,192_30_4,193_29_4,191_30_4 output=Landsat_B4 r.patch -z in=192_29_3,192_30_3,193_29_3,191_30_3 output=Landsat_B3
Maintenant, tous les éléments pour les calculs NDVI sont disponibles. C'est le moment d'apprendre comment faire une nouvelle carte en partant des existantes!
La meilleure approche est d'utiliser la commande shell r.mapcalc:
r.mapcalc "NDVI=(float(Landsat_B4 - Landsat_B3) / (Landsat_B4 + Landsat_B3) + 1)*100"
Pour obtenir une division à virgule flottante (les cartes Landsat sont des cartes d'entiers), la fonction float est nécessaire. La commande crée une nouvelle carte, appelée NDVI, en opérant, cellule par cellule, sur les valeurs des cartes Landsat_B3 et Landsat_B4.
Enfin, vous devez reprojeter la carte NDVI à l'emplacement de la Toscane. Pour cela, sortez de la session GRASS, redémarrez le programme, et entrez dans l'emplacement de la Toscane. Là, lancez la commande:
r.proj input=NDVI location=landsat output=NDVI
Si aucun problème ne survient, vous allez obtenir 2 maillages de cartes à cet emplacement. Pour récupérer de l'espace disque, tous les autres emplacements peuvent être effacés. Cela se fait en quittant GRASS, en changeant le répertoire en $HOME/GRASS, et en effaçant les répertoires tuscany2, landsat, landsat2, et landsat2b. La carte obtenue sera montrée dans la prochaine section, une fois que l'on aura appris comment la “masquer” pour ne montrer que les pixels de la Toscane.
Comme pour les données SRTM, les données Landsat sont également mondiales, on peut donc répéter la procédure pour toute autre zone sur Terre.
Les limites des états, des départements et des communes peuvent être récupérées à partir de différentes sources, en fonction de la région concernée. Pour les régions italiennes, par exemple, elles sont disponibles sur le site ISTAT (en italien). Le fichier qui nous intéresse peut être téléchargé depuis le panneau de droite. Ce fichier contient les limites des régions italiennes.
Téléchargez le fichier dans un nouveau répertoire, par exemple, $HOME/IT, puis dé-zippez le. Le contenu de l'archive est composé de plusieurs fichiers, dont l'un est un fichier .shp, un type de vecteur de données largement utilisé.
Pour lire ce type de données avec GRASS, vous devez procéder de la façon suivante. Démarrez GRASS sur la région de la Toscane, puis lancez la commande ():
v.in.ogr -e dsn=/home/matt/IT/reg2001_s.shp output=reg_boundaries min_area=0.0001 snap=-1 location=italy_reg
L'importation nécessite la spécification d'un paramètre de transformation de données. Dans l'invite de commande, vous pouvez sélectionner le paramètre 8, valable pour tout l'espace européen. A la fin, vous obtiendrez un nouvel emplacement, nommé italy_reg, qui comportera une carte vectorielle nommée reg_boundaries.
Maintenant, quittez la session GRASS et redémarrez à l'emplacement nouvellement créé. Le carte vectorielle acquise contient les limites politiques de toutes les régions italiennes. Pour notre exemple, seule la région de la Toscane nous intéresse, nous avons donc à extraire un élément de la carte. Pour une carte vectorielle, c'est une opération assez simple, puisque cela équivaut à l'extraction d'éléments d'une base de données à l'aide d'une requête.
Pour faire l'extraction, on doit d'abord apprendre comment examiner la base de données associée à la carte vectorielle. Cela se fait facilement dans l'interface graphique. Les couches de vecteurs sont ajoutées à la couche affichage, d'une manière similaire à celle des couches matricielles. La seule différence est que l'utilisateur doit appuyer sur le bouton .

Sélectionnez la couche ajoutée dans la partie haute de l'interface graphique. Dans la partie basse, qui devient alors disponible, choisissez la carte vectorielle que vous souhaitez afficher, en utilisant le champ texte « Vector map » ou le bouton correspondant. Il y a beaucoup plus d'options pour les cartes vectorielles que pour les cartes matricielles. Pour le moment, nous nous intéressons aux deux boutons placés à la fin de la liste. Faites défiler la fenêtre, vous devriez voir les boutons et .
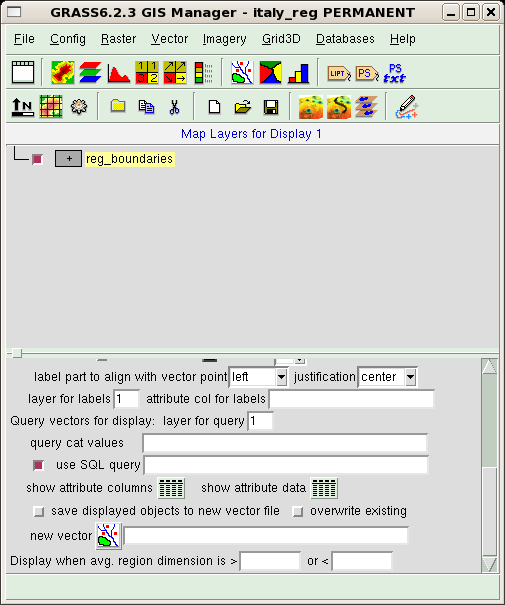
Ces boutons permettent d'accéder à la base de données liée à la carte et renvoient, respectivement, les noms des colonnes de la base de données et le contenu de la base entière, ce que montre la figure suivante où ces sorties sont affichées. Notez que chaque sortie est précédée par la commande envoyée par l'interface graphique à l'interpréteur shell.
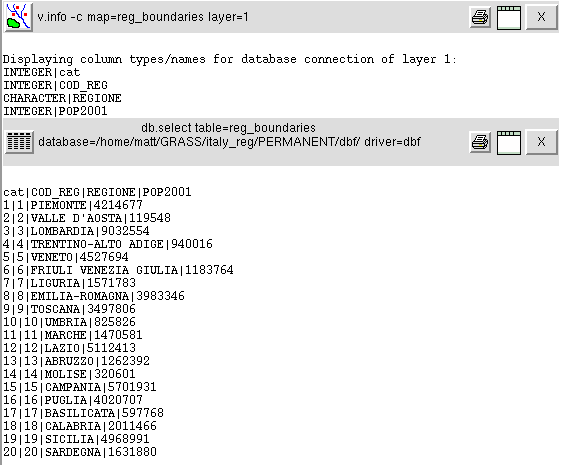
La base de données contient quatre colonnes: une clé utilisée comme index de la table, le code des régions, leur nom et leur population tels qu'ils ont été enregistrés en 2001. Le code de la région peut être utilisé pour l'extraction de la Toscane. On peut le faire en entrant la commande:
v.extract in=reg_boundaries out=tuscany_boundaries new=-1 where="COD_REG=9"
La carte tuscany_boundaries va être créée. L'option new=-1 préserve la table de la base de données, en l'exportant dans une nouvelle carte.
Avant de fermer et nous reconnecter à l'emplacement de la Toscane, nous allons montrer comment convertir une carte vectorielle en une carte matricielle. Cette étape va créer une silhouette de la région de la Toscane, qui va nous aider plus tard à « couper » la carte des altitudes et NDVI à la bonne taille. La résolution de la carte vectorielle est beaucoup plus faible que celle de l'emplacement de la Toscane (constatez le vous-même: g.region -p). Donc, nous augmentons la résolution et ensuite convertissons la carte vectorielle:
g.region nsres=90 g.region ewres=90 v.to.rast input=tuscany_boundaries output=MASK use=val
Cette commande crée la carte MASK (un nom de carte réservé), en assignant à toutes les cellules la même valeur (option use=val). Quand une carte matricielle nommée MASK existe dans l'emplacement, la plupart des opérations matricielles (sur toute carte matricielle) auront lieu seulement dans les mailles spécifiées par le MASK.
Maintenant, redémarrez GRASS, et accédez à l'emplacement de la Toscane. Ensuite reprojetez les cartes vectorielles et matricielles depuis italy_reg:
v.proj input=tuscany_boundaries location=italy_reg output=tuscany_boundaries r.proj input=MASK location=italy_reg output=MASK
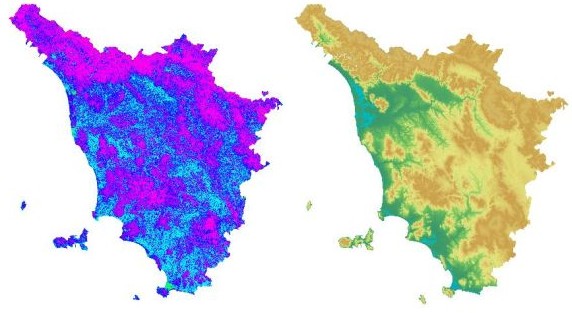
Si on essaye d'afficher la carte matricielle de l'altitude, comme nous l'avons fait précédemment, le résultat est différent. La carte d'altitude est masquée, et seules les cellules de la Toscane seront montrées. La même chose se produit pour la carte NDVI. Les deux cartes sont montrées sur la figure suivante (NDVI à gauche, altitude à droite).
Les données de couverture terrestre sont disponibles depuis différentes sources, en fonction de la région qui vous intéresse. Pour les pays européens, vous pouvez vous reporter à la Corine Land Cover (CLC). La CLC est une carte des paysages environnementaux européens basés sur l'interprétation d'images satellites; elle fournit des cartes numériques comparables des couvertures terrestres de chaque pays pour une grande partie de l'Europe, et comporte 47 classes de couvertures terrestres. Les données sur les couvertures terrestres sont nécessaires pour la politique environnementale, le développement régional et les politiques agricoles.
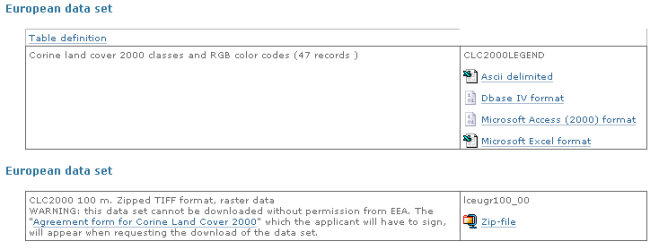
Les données Corine Land Cover 2000 peuvent être téléchargées avec une résolution horizontale de 100m sous la forme matricielle (GeoTIFF) depuis le site web de l'Agence Européenne de l'Environnement (http://dataservice.eea.europa.eu/dataservice/metadetails.asp?id=1007). Il est demandé aux utilisateurs de compléter le « formulaire d'accord pour la Corine Land Cover 2000 », qui est présenté avant le téléchargement. De cette manière, vous pouvez télécharger toute la zone européenne contenue dans le fichier lceugr100_00EEA17938I.zip (approx 66MB). La page de téléchargement est montrée à la figure suivante. Sur la même page, vous trouverez le fichier (quatre formats sont disponibles) comportant la légende pour l'interprétation de la carte.
Il y a aussi la possibilité de télécharger les données au format vecteur (shapefile .shp), en sélectionnant dans une grille seulement les régions intéressantes (voir http://www.eea.europa.eu/themes/landuse/clc-download).
Après avoir téléchargé le fichier dans un répertoire, par exemple $HOME/CLC, décompressez le; les fichiers vont être placés dans un sous-répertoire nommé lceugr100_00. Ensuite, démarrez GRASS à l'emplacement de la Toscane et importez les données dans le nouvel emplacement (par exemple, CLC):
r.in.gdal -e input=/home/matt/CLC/lceugr100_00/lceugr100_00_pct.tif output=CLC location=CLC
Les données CLC peuvent être reprojetées dans l'emplacement courant:
r.proj input=CLC location=CLC output=CLC method=nearest
La nouvelle carte matricielle peut être affichée comme montré précédemment. Le résultat est présenté dans la figure suivante; la présence de la matrice MASK va couper la carte selon les limites désirées.
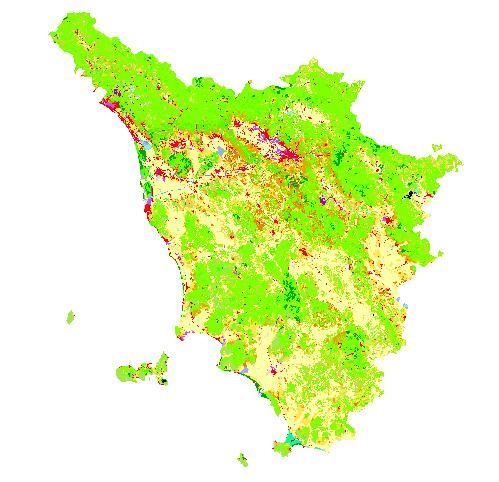
Les différentes zones sont représentées de différentes couleurs. On trouvera la légende pour l'interprétation de la carte dans le fichier $HOME/CLC/lceugr100_00/clc_legend.xls. A partir de ce fichier on constate que, par exemple, le code CLC 111 représente les Surfaces artificielles/tissus urbain/tissus urbain continu et est représenté en couleurs RGB 230-0-77, tandis que le code 221 est pour les zones agricoles/cultures permanentes/vignobles, et ses couleurs RGB sont 230-128-0.
Après une importation réussie de la carte, on peut récupérer beaucoup d'espace disque en effaçant l'emplacement CLC. Cela se fait en quittant GRASS et en supprimant le répertoire $HOME/GRASS/CLC.
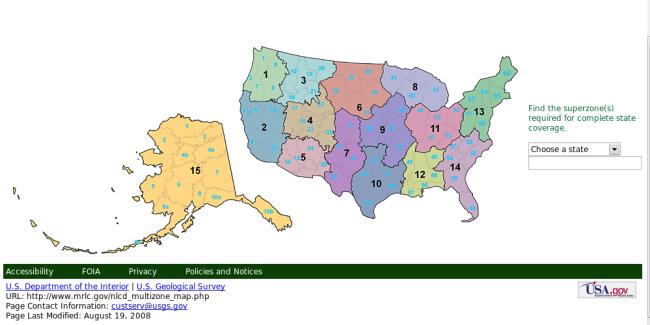
Lorsque la zone recherchée est à l'intérieur des USA, l'utilisateur peut se reporter à la National Land Cover Datbase (NLCD 2001). C'est une mise à jour de NLCD 1992 qui contient 21 classes de couvertures terrestres avec une résolution de 30m par cellule. Les 76 zones cartographiées au standard NLCD ont été groupées dans 15 zones plus grandes pour faciliter la distribution et le téléchargement. L'adresse du site de téléchargement est http://www.mrlc.gov/nlcd_multizone_map.php.
Cette page contient aussi un lien vers un fichier shapefile zippé (3MB) avec les zones du standard NLCD ainsi qu'avec un attribut multizone. Téléchargez le dans le dossier $HOME/US, et dézippez son contenu: un sous répertoire nommé landcover_bndry_030607_shp sera créé pendant le processus. Ici, en même temps que plusieurs autres fichiers, on trouvera le fichier shapefile landcover_bndry_030607.shp, que nous importerons plus tard dans un nouvel emplacement.
L'étape suivante consiste à télécharger la couverture terrestre de la zone qui nous intéresse: on a le choix entre télécharger des données pour un état ou pour une plus grande zone (superzones). Par exemple, choisissons les données de la superzone 13 en cliquant dessus sur la carte US affichée. Dans la page qui va s'ouvrir, sélectionnez le lien Land Cover zip file, et enregistrez le fichier associé area_13_landcover.zip (130 MB) dans le dossier $HOME/US, puis décompressez son contenu. Entre autres fichiers, vous verrez le fichier matriciel landcover13_3k_022007.img, que nous allons importer dans GRASS.
Après avoir redémarré GRASS à l'emplacement de la Toscane, nous pouvons importer les données matricielles de la superzone 13 dans un nouvel emplacement, disons, USA:
r.in.gdal -e input=/home/matt/US/landcover13_3k_022007.img output=area13 location=USA
Pour cette importation, il est nécessaire de spécifier les paramètres de transformation de données. Dans le prompt, vous pouvez sélectionner le paramètre 6, valide pour toute la région de l'Amérique du Nord.
Quittez GRASS, et redémarrez à l'emplacement des USA. Ensuite, importez le fichier shapefile contenant les limites des états, et étendez les frontières de l'emplacement pour qu'elles correspondent à celles de la carte vectorielle:
v.in.ogr -o dsn=/home/matt/US/landcover_bndry_030607.shp output=boundaries min_area=0.0001 snap=-1 g.region vect=boundaries
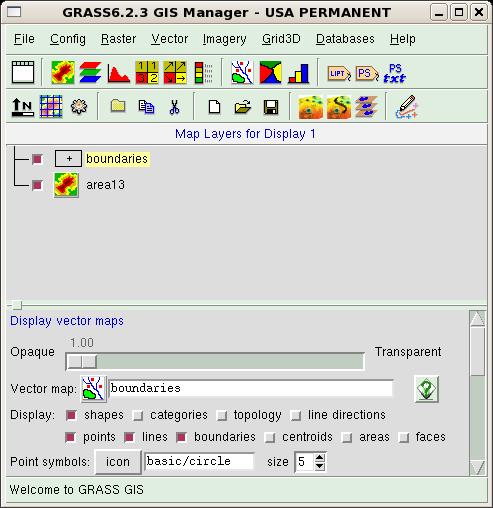
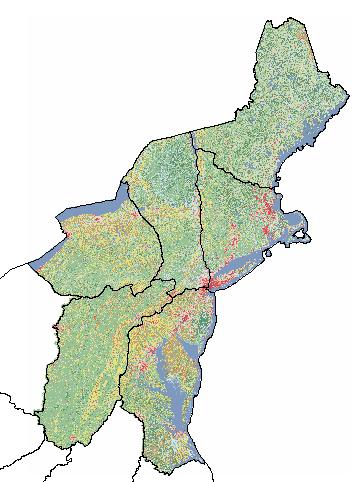
Enfin, nous pouvons afficher la carte ainsi obtenue en superposant la couche vectorielle à la matricielle. Pour ce faire, dans l'interface graphique, on commencera par ajouter une couche matricielle pour la visualisation et on sélectionnera la zone 13 de la carte matricielle. Ensuite, ajoutez une couche vectorielle et sélectionnez les limites de la carte. En utilisant la couche vectorielle, on peut afficher une variété d'objets: points, lignes, centroïdes, et surfaces. Pour afficher uniquement les lignes des limites, désélectionnez les cases à cocher des centroïdes et des surfaces, comme dans la figure ci-dessous.
Ensuite, activez la fenêtre Map Display, et appuyez sur le bouton d'affichage. Le résultat zoomé doit ressembler à ceci:
La procédure décrite peut être adaptée à d'autres emplacements sur la planète. Voici une référence utile pour les données de couverture: http://landcover.usgs.gov/landcoverdata.php.
Avec les données climatologiques, une méthode totalement nouvelle de recherche d'information est apparue. Alors que les données d'altitude peuvent être considérées comme statiques (en effet, leur valeur ne change pas dans le temps), et que les données Landsat et celles de l'aménagement du territoire évoluent doucement dans le temps (en fait, on peut trouver des articles de recherche comparant la situation Landsat sur différentes décennies pour suivre la trace de l'évolution du climat mondial), les données climatologiques changent rapidement. Donc, la première question que l'on doit se poser est: « Quel type de données est-ce que je cherche? » Ce sont peut-être les mesures quotidiennes ou même heure par heure qui vous intéressent, ou les moyennes mensuelles, ou même les moyennes saisonnières ou annuelles. De plus, les moyennes annuelles et saisonnières peuvent être évaluées sur une longue période (par exemple, 15 ans) pour faire disparaître les fluctuations provoquées par un été vraiment chaud ou un hiver très froid.
Le second aspect à considérer est le format dans lequel les données sont distribuées. Les mesures sont habituellement fournies en format tableau: les tables contiennent les valeurs enregistrées par un ensemble de stations météorologiques réparties sur la région qui nous intéresse. Les principales variables enregistrées sont la température (minimum, maximum, moyenne), l'humidité, et les précipitations. Les valeurs pour les endroits sans stations météorologiques peuvent être obtenues par les utilisateurs en utilisant les techniques d'interpolation. C'est un procédé difficile, et qui demande une analyse en profondeur, parce qu'il implique soit de la manipulation de données (par exemple, la transformation de données journalières dans les tables pour obtenir une moyenne saisonnière; la sélection des stations intéressantes, etc.), soit de l'interpolation avec des techniques de statistiques avancées (l'interpolation par krigeage universel). Cette dernière étape peut être effectuée, par exemple, en interfaçant GRASS avec R, un programme statistique que nous avons brièvement décrit dans le numéro 138 de Linux Gazette.
Puisqu'une description détaillée de toutes les procédures représentées ici serait longue et complexe, nous la reportons à un prochain article.
Dans cette longue digression, nous avons présenté quelques caractéristiques de base du logiciel, mais avons négligé presque complètement de décrire le moyen d'analyser et de relier les données entre elles. Cette approche est motivée par notre expérience avec GRASS. En fait, quand nous avons commencé à utiliser ce logiciel, nous nous sommes rendu compte qu'il y a beaucoup de bons tutoriels et manuels décrivant dans les moindres détails toutes les opérations possibles avec le logiciel ; cependant nous avons eu beaucoup de difficultés à trouver et acquérir des cartes thématiques, soit parce que les tutoriels portent en général principalement sur un jeu de données standard (fournies à titre d'exemple de données d'emplacement avec GRASS) soit parce que l'information dont nous avions besoin était éparpillée sur le Net. Nous espérons que le présent document contribuera à combler cette lacune.
En attendant notre prochain article, les lecteurs qui s'intéressent vraiment à ce logiciel peuvent commencer par parcourir les pages de documentation disponibles sur le site web de GRASS, qui héberge aussi des documents en langue autre que l'anglais. Nous recommandons les documents suivants:
Introduction to GRASS GIS software. http://grass.osgeo.org/gdp/neteler/index.html
An introduction to the practical use of the Free Geographical Information System GRASS 6.0. http://www.gdf-hannover.de/lit_html/grass60_v1.2_en/index.html (HTML), http://www.gdf-hannover.de/dl.php?download=gdf_grass60_v1.2_en.pdf(PDF)
GRASS 6 in a nutshell. http://mpa.itc.it/markus/osg05/
D'autres ressources disponibles sur internet peuvent être utiles:
Geographic Information System. http://en.wikipedia.org/wiki/Geographic_information_system
GIS file formats. http://en.wikipedia.org/wiki/GIS_file_formats
Description of possible projections. http://en.wikipedia.org/wiki/Map_projection
Universal Transverse Mercator coordinate system. http://en.wikipedia.org/wiki/Universal_Transverse_Mercator_coordinate_system
Gauss-Krüger coordinate system. http://en.wikipedia.org/wiki/Gauss-Krüger_coordinate_system
Geographic Information Systems. http://erg.usgs.gov/isb/pubs/gis_poster/
Adaptation française de la Gazette Linux
L'adaptation française de ce document a été réalisée dans le cadre du Projet de traduction de la Gazette Linux.
Vous pourrez lire d'autres articles traduits et en apprendre plus sur ce projet en visitant notre site : http://www.traduc.org/Gazette_Linux.
Si vous souhaitez apporter votre contribution, n'hésitez pas à nous rejoindre, nous serons heureux de vous accueillir.